基于共享控制的驾驶权限接管方法研究
研究背景与意义
在探索自动驾驶技术的未来时,我们不得不关注它如何逐渐融入我们的日常生活。近年来,随着人工智能的飞速发展,自动驾驶汽车已经从科幻小说中的概念,变成了现实世界中的一部分。众多汽车制造商和科技公司纷纷推出了自己的自动驾驶解决方案,技术不断进步,成本逐步降低,预示着自动驾驶汽车将很快成为我们交通出行的常态。
目前大多数自动驾驶车辆仍处于L2或L3级别,车辆可以执行如车道保持、定速巡航等任务。但驾驶员仍然需要时刻监督,在必要情况下,自动驾驶车辆会退出自动驾驶模式并把控制权交还给驾驶员,这样的过程被称为“接管”。
尽管驾驶员被要求保持在控制回路内,但人在监管过程中仍然可能会分心,甚至从事非驾驶相关任务,这会导致驾驶员降低对情景的感知,这会严重影响接管的质量与安全。此外,即使驾驶员在接管过程中保持注意力,接管时也可能会发生过激行为(missing reference)。这种紧张、突兀的接管过程会导致车辆不平稳或置于危险的境地,进而影响后续的手动驾驶。因此,实现平滑和安全的接管过程对保证车辆安全至关重要。
为了确保车辆在接管过程中的稳定性和安全性,实现平滑和安全的接管过程至关重要。目前,一种常见的策略是在发出接管请求后,立即切换到人类控制。但这种方法可能会使驾驶员感到紧张,尤其是当他们正在从事非驾驶任务时。此外,这种生硬的切换不仅可能导致事故,还可能削弱人们对自动驾驶系统的信任。
在自动驾驶的场景中,驾驶权限的平滑过渡对于保持车辆稳定、减少事故和提升驾驶员对环境的认知至关重要,同时也能增强驾驶员对自动驾驶系统的信任。
研究现状
接管过程的设计受到了全球研究人员的广泛关注。这个过程是自动驾驶和手动驾驶两种模式之间的桥梁,如图1所示。在接管过程中,控制权逐渐从自动驾驶系统转移到人类驾驶员,形成了一种人机共驾的系统。这种系统将融合自动驾驶算法,以实现合理的权限分配。
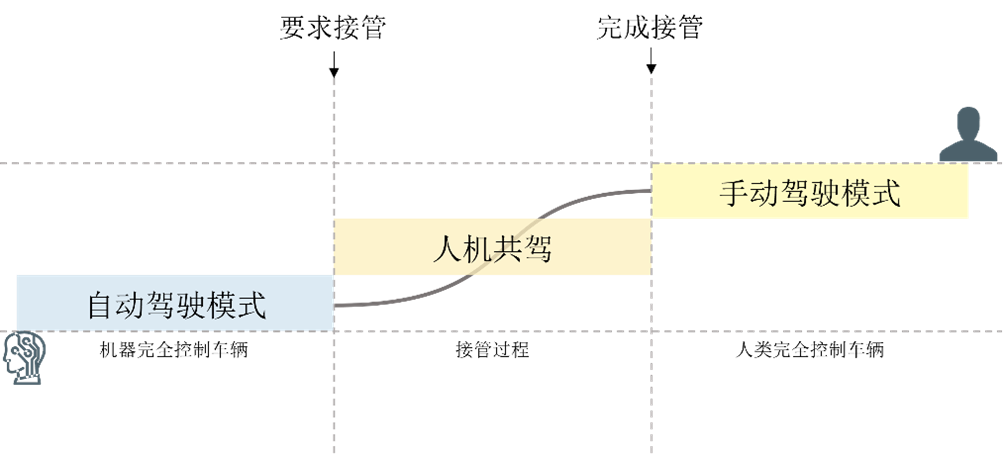
图1 接管过程示图示
在人机共驾的研究中,大多数研究集中在操作层,即车辆的具体控制,如加速、减速和转向。在这一层面,驾驶员的输入与自动驾驶系统的控制器相互作用,对于不同的驾驶场景,不同的学者利用不同的控制器来实现对人类的辅助。尽管这种融合可以提高系统性能并减轻驾驶员的工作负担(missing reference),但它难以解决因人机目标意图分歧而产生的冲突。产生冲突的根本原因在于人的意图与自动驾驶系统的规划目标不同,二者朝着不同的目标执行控制动作,势必会产生冲突。
战术层的融合则关注具体的驾驶操作,如超车。在这一层面,驾驶员的意图与自动驾驶系统的规划层相互融合,直接影响操作的执行。许多研究集中在人机协作轨迹规划上,即驾驶员意图直接影响自动驾驶系统的规划结果。通过在代价函数中加入人类意图,使轨迹更符合人类期望(missing reference)。此外,还有人提出了基于模糊控制的共享控制方法,实现了操作层和战术层的人机融合,证明了规划层的人机合作可以有效降低人机冲突。然而,人机协作轨迹规划的结果可能难以在短时间内被驾驶员理解,尤其是在接管这种时间窗口较短的行为中。因此,人机协作行为规划将人类意图与自动驾驶系统的行为规划层融合,生成高级的语义动作,如变道、超车等,这种规划结果更适合在接管过程中展现机器的意图和决策结果。
对于接管过程这一场景,学界从接管方式,接管界面,接管时机,测评方法(missing reference)等多方面进行了研究。针对权限转移方面,不同学者提出了不同的方法,来确保接管过程的平滑与安全(missing reference)。但是和人机共驾的大多研究一样,大部分研究都集中在操作层。但是,可以预见,通过在操作层和战术层的融合,我们能够更好地理解人类驾驶员的意图,并将其与自动驾驶系统的决策相结合,从而实现更安全、更有效的接管过程。
展望
接管过程是当前非完全自动驾驶技术能力下不可避免的一环,这一过程天然的有人与机器的共同参与,是人机共驾领域一个重要的研究方向,对于接管过程控制权限的平滑移交,保证驾驶安全,未来的研究或许可以从以下几个方面进一步深入:
- 接管时机的优化:研究如何更准确地预测接管的最佳时机,以减少驾驶员的紧张感和提高接管的平稳性。
- 人机交互界面的改进:开发更直观、更友好的人机交互界面,使驾驶员能够更清晰地理解自动驾驶系统的意图和状态。
- 多种模式提醒的综合应用:使用多种提醒模式,兼顾舒适性与安全性,在驾驶员监管过程中使用声、光、触等方式提示驾驶员。
- 驾驶员行为的建模:通过机器学习等技术,建立更精确的驾驶员行为模型,以预测驾驶员在不同情况下的反应。
- 多模态感知系统的集成:集成视觉、听觉、触觉等多种感知方式,以提高系统对驾驶员状态的感知能力。
- 安全冗余的自动驾驶算法:在接管过程中,使用安全系数更高的自动驾驶算法,进一步保证安全。